ESP32 CAN
The ESP32 has an integrated CAN controller and therefore doesn’t necessarily need an external controller. Some variants (ESP32-C5, ESP32-C6, ESP32-P4) have multiple CAN controllers - see Multiple CAN Controllers below. You only need to specify the RX and TX pins. Any GPIO will work.
# Example configuration entrycanbus: - platform: esp32_can tx_pin: GPIOXX rx_pin: GPIOXX can_id: 4 bit_rate: 50kbps on_frame: ...Configuration variables
Section titled “Configuration variables”-
rx_pin (Required, Pin): Receive pin.
-
tx_pin (Required, Pin): Transmit pin.
-
mode (Optional, enum): Operating mode. One of:
NORMAL: Normal operation, sends ACK signals. (default)LISTENONLY: Receive data only, no ACK signals sent.
-
rx_queue_len (Optional, int): Length of RX queue.
-
tx_queue_len (Optional, int): Length of TX queue, 0 to disable.
-
tx_enqueue_timeout (Optional, Time): Maximum time to wait when the TX queue is full before dropping the message (by default, this is set to the time it takes to send 10 CAN messages at the given bit rate).
-
All other options from Canbus.
Listen-Only Mode
Section titled “Listen-Only Mode”Listen-only mode configures the ESP32’s TWAI controller to passively monitor CAN bus traffic without participating in the protocol. In this mode:
- The controller receives all CAN frames but does not send ACK signals
- Transmission is disabled (attempts will log a warning)
This is particularly useful for:
- BMS monitoring: Tapping into battery-to-inverter communication (e.g., Pylontech, Deye)
- CAN bus debugging: Observing traffic without interfering
- Multi-master scenarios: When the ESP32 should observe but not participate
# Example configuration for passive CAN bus monitoringcanbus: - platform: esp32_can tx_pin: GPIOXX rx_pin: GPIOXX bit_rate: 500kbps mode: LISTENONLY on_frame: - can_id: 0x355 then: - lambda: |- ESP_LOGI("can", "SOC: %d%%", x[0]);NOTE
In listen-only mode, the ESP32 will not send ACK signals. This means other devices on the bus will not receive acknowledgment for their transmissions from the ESP32. This is the desired behavior when monitoring an existing bus where other devices are already handling acknowledgments.
TIP
The tx_pin is still required even in listen-only mode, as the ESP32 TWAI driver requires both pins for initialization. However, no data will be transmitted on this pin when using LISTENONLY mode.
The following table lists the bit rates supported by the component for ESP32 variants:
| bit_rate | ESP32 | Other variants* |
|---|---|---|
| 1KBPS | x | |
| 5KBPS | x | |
| 10KBPS | x | |
| 12K5BPS | x | |
| 16KBPS | x | |
| 20KBPS | x | |
| 25KBPS | x | x |
| 31K25BPS | ||
| 33KBPS | ||
| 40KBPS | ||
| 50KBPS | x | x |
| 80KBPS | ||
| 83K3BPS | ||
| 95KBPS | ||
| 100KBPS | x | x |
| 125KBPS (Default) | x | x |
| 250KBPS | x | x |
| 500KBPS | x | x |
| 800KBPS | x | x |
| 1000KBPS | x | x |
Other variants: ESP32-C3, ESP32-C5, ESP32-C6, ESP32-H2, ESP32-P4, ESP32-S2, ESP32-S3
NOTE
ESP32-C2 and ESP32-C61 do not have TWAI/CAN hardware and are not supported.
Multiple CAN Controllers
Section titled “Multiple CAN Controllers”Some ESP32 variants have multiple CAN (TWAI) controllers:
- ESP32-C5: 2 controllers
- ESP32-C6: 2 controllers
- ESP32-P4: 3 controllers
All other supported variants have a single controller. ESP32-C2 and ESP32-C61 do not have CAN hardware.
Wiring options
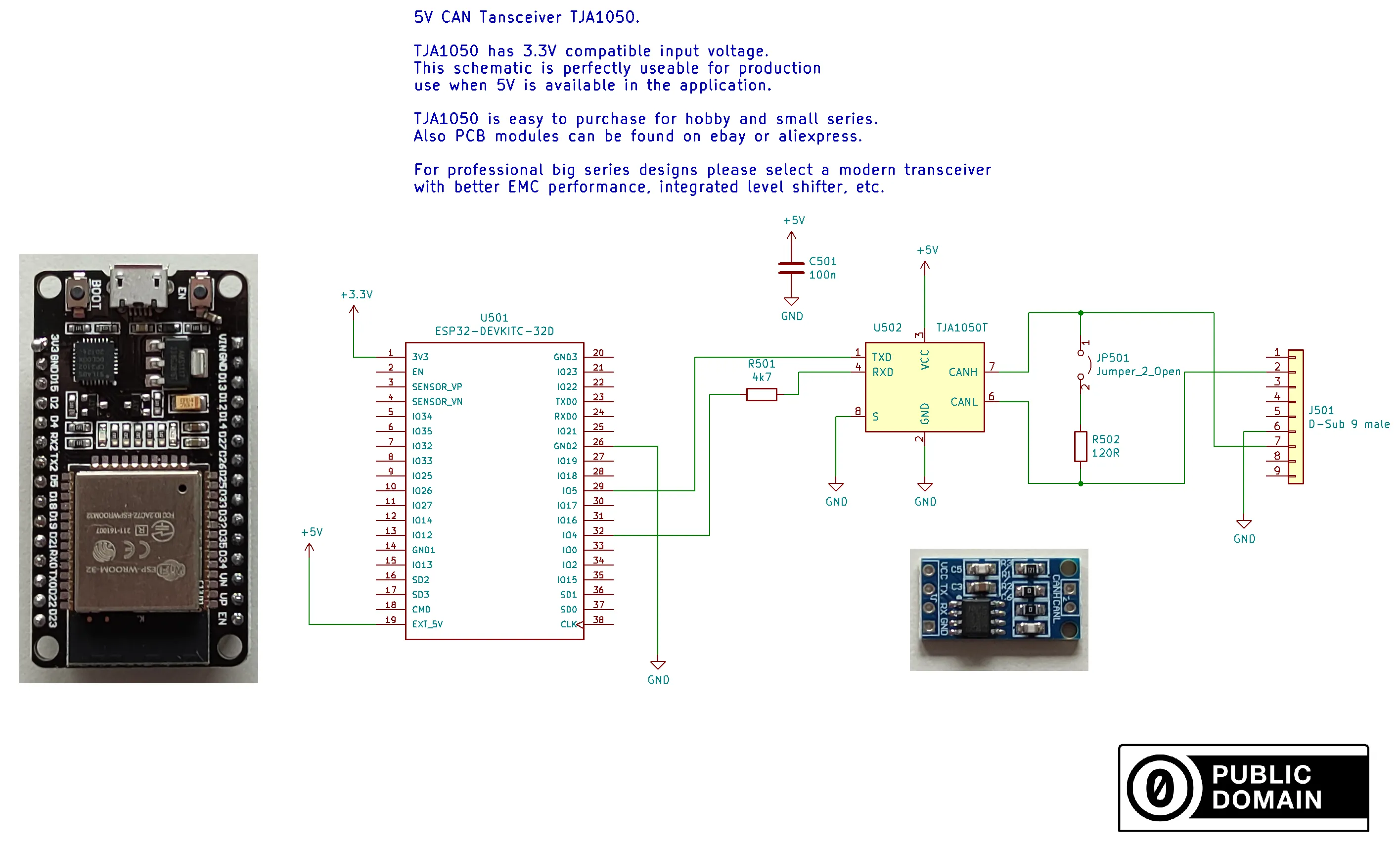
Section titled “Wiring options”5V CAN transceivers are cheap and generate compliant levels. If you power your board with 5V this is the preferred option. R501 is important to reduce the 5V logic level down to 3.3V, to avoid damaging the ESP32. You can alternatively use a voltage divider here instead.
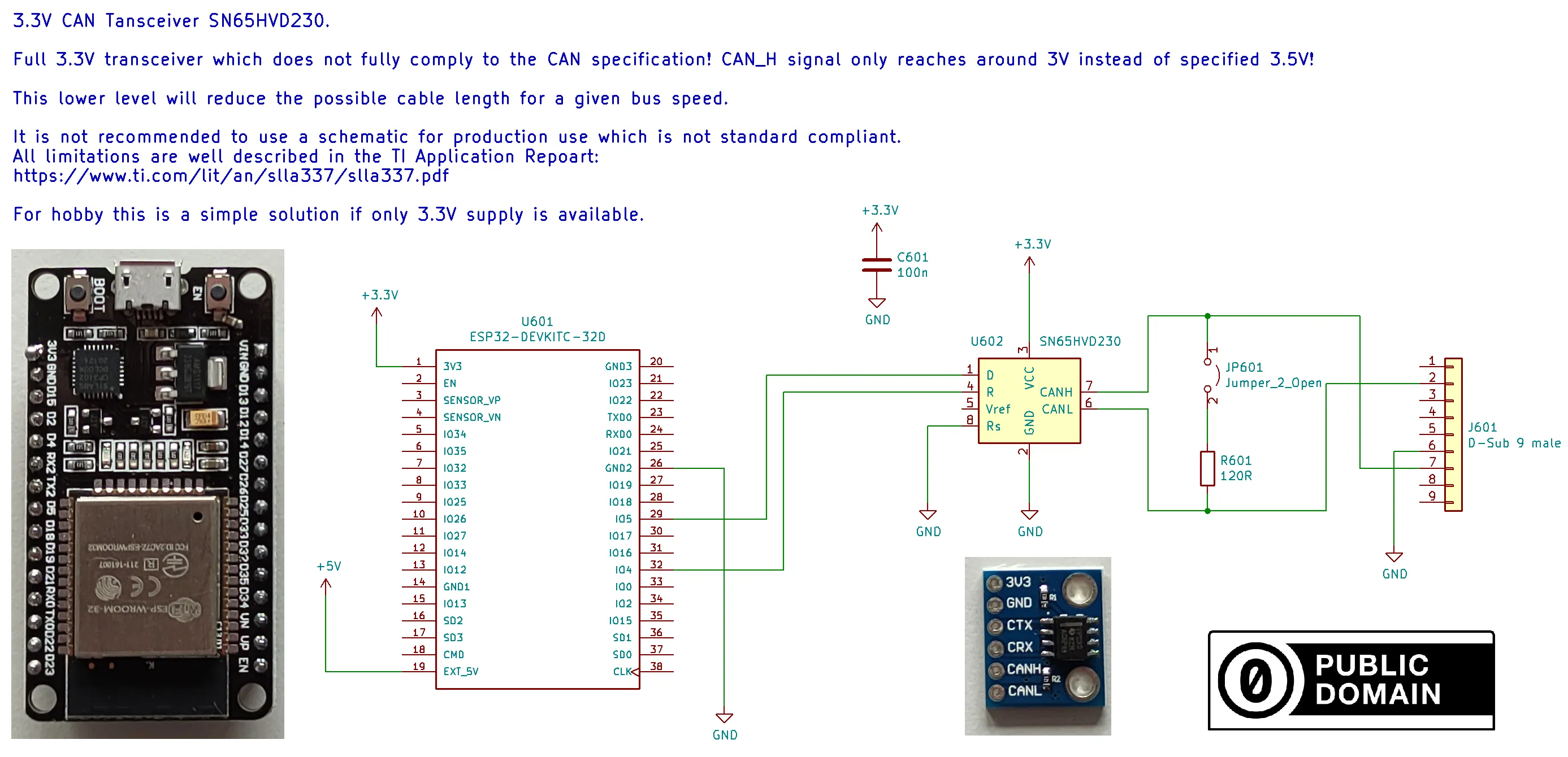
If you prefer to only have a 3.3V power supply, special 3.3V CAN transceivers are available.