VL53L0X Time Of Flight Distance Sensor
The vl53l0x sensor platform allows you to use VL53L0X optical time of flight
(datasheet,
ST) with ESPHome
to measure distances. The sensor works optically by emitting short infrared pulses
and measuring the time it takes the light to be reflected back
The sensor can measure distances up to 2 meters, though that figure depends significantly on several conditions like surface reflectance, field of view, temperature etc. In general you can expect surfaces up to 60cm to work, after that you need to make sure the surface is reflecting well enough (see also section 5 of datasheet).
The I²C Bus is required to be set up in your configuration for this sensor to work.
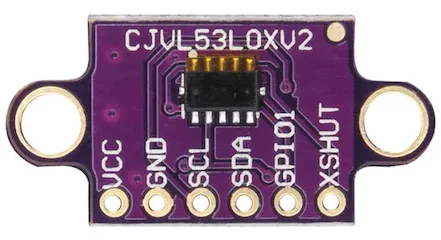
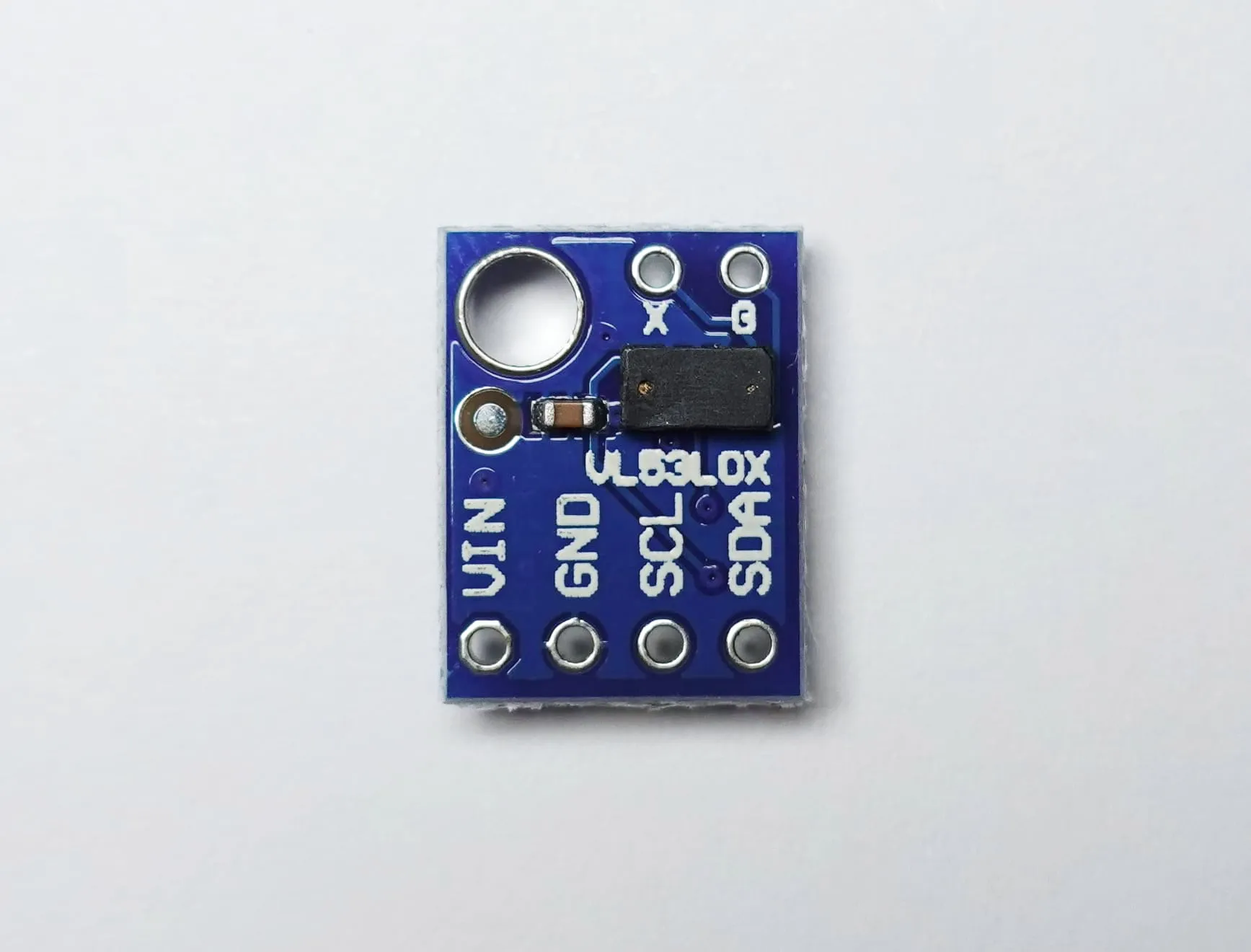
VCCconnects to 3V3 (3V3will output 3.3V), or directly connectVCCto 3.3VGNDconnects to groundSCLconnects I2C SCL (clock)SDAconnects I2C SDA (data)GPIO1is not used by ESPHomeXSHUTconnects to free GPIO pin. Enable/disable device. This is optional if there is only one VL53L0X sensor on the I²C bus and the default0x29address is used. Depending on your sensor, this might be required even with only one sensor on the I²C bus. This is always required for multiple sensors.
# Simple configuration entry examplesensor: - platform: vl53l0x name: "VL53L0x Distance" address: 0x29 update_interval: 60s long_range: trueConfiguration variables
Section titled “Configuration variables”-
update_interval (Optional, Time): The interval to check the sensor. Defaults to
60s. -
signal_rate_limit (Optional, float): Set the return signal rate limit in units of MCPS (mega counts per second). This is the minimum signal amplitude detected by the sensor necessary for it to report a valid reading. Setting a lower value may increase the range of the sensor but also increases the chance of getting inaccurate readings. Defaults to
0.25. -
long_range (Optional, boolean): Set the sensor in long range mode. The signal_rate_limit is overruled to
0.1. Defaults tofalse. -
address (Optional, int): Manually specify the i2c address of the sensor. Defaults to
0x29. If an address other the0x29is specified, the sensor will be dynamically re-addressed at startup. A dynamic re-address of sensor requires theenable_pinconfiguration variable to be assigned. If more then one VL53L0X sensor is used on the same i2c bus, a unique address must be specified per sensor. -
enable_pin (Optional, Pin Schema): The pin connected to XSHUT on vl53l0x to enable/disable sensor. Required if not using address
0x29which is the cause if you have multiple VL53L0X on the same i2c bus. In this case you have to assign a different pin to each VL53L0X. -
timeout (Optional, Time): Sensor setup timeout. Default to
10ms. -
timing_budget (Optional, Time): Set the timing budget the sensor will use for a single range measurement. Range is from 20000us - 4294967295us, inclusive. The timing budget allows the user to trade off speed for accuracy. If not specified, the default timing budget is 33000us.
-
All other options from Sensor.
# Muliple VL53L0X sensors on same i2c bus# Example configuration entrysensor: - platform: vl53l0x name: "distance1" id: distance1 address: 0x41 enable_pin: GPIOXX timeout: 200us update_interval: 500ms unit_of_measurement: "m"
- platform: vl53l0x name: "distance2" id: distance2 address: 0x42 enable_pin: GPIOXX timeout: 200us update_interval: 500ms unit_of_measurement: "m"